
Note
Go to the end to download the full example code
Seismic Wave Tomography via Fast Marching#
If you are running this notebook locally, make sure you’ve followed steps here to set up the environment. (This environment.yml file specifies a list of packages required to run the notebooks)
0. Import modules#
# -------------------------------------------------------- #
# #
# Uncomment below to set up environment on "colab" #
# #
# -------------------------------------------------------- #
# !pip install -U cofi geo-espresso
# !git clone https://github.com/inlab-geo/cofi-examples.git
# %cd cofi-examples/examples/fmm_tomography
import numpy as np
import matplotlib.pyplot as plt
import pprint
import cofi
import espresso
In this notebook, we use cofi to run a seismic wave tomography
example, in which the forward calculation is based on the Fast Marching
Fortran code by Nick Rawlinson. The Fast Marching code is wrapped in
package espresso.
Theoretical background#
# display theory on travel time tomography
from IPython.display import display, Markdown
with open("../../theory/geo_travel_time_tomography.md", "r") as f:
content = f.read()
display(Markdown(content))
<IPython.core.display.Markdown object>
In this notebook we form and solve a travel time tomography problem
using model damping and 2nd derivative smoothing. For forward modelling,
a fast marching wave front tracker is used, utilizing the Fast Marching
Fortran code within the package
`FMTOMO <http://iearth.edu.au/codes/FMTOMO/>`__ by Nick Rawlinson.
Problem setup#
Before we starting working with cofi, let’s get familiar with the
problem itself.
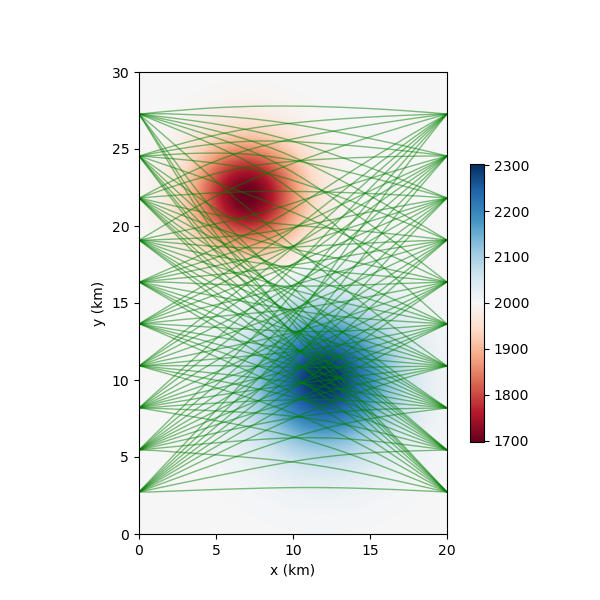
Below is a plot of the true model and the paths generated from this model. As you can see, there are two anomalies, one with lower velocity (red, top left) and the other with higher velocity (blue, bottom right).
fmm = espresso.FmmTomography()
fmm.plot_model(fmm.good_model, with_paths=True);
New data set has:
10 receivers
10 sources
100 travel times
Range of travel times: 0.008911182496368759 0.0153757024856463
Mean travel time: 0.01085811731230709
Trying to fix now...
Execute permission given to fm2dss.o.
<Axes: xlabel='x (km)', ylabel='y (km)'>
pprint.pprint(fmm.metadata)
{'author_names': ['Nick Rawlinson', 'Malcolm Sambridge'],
'citations': [('Rawlinson, N., de Kool, M. and Sambridge, M., 2006. Seismic '
'wavefront tracking in 3-D heterogeneous media: applications '
'with multiple data classes, Explor. Geophys., 37, 322-330.',
''),
('Rawlinson, N. and Urvoy, M., 2006. Simultaneous inversion of '
'active and passive source datasets for 3-D seismic structure '
'with application to Tasmania, Geophys. Res. Lett., 33 L24313',
'10.1029/2006GL028105'),
('de Kool, M., Rawlinson, N. and Sambridge, M. 2006. A '
'practical grid based method for tracking multiple refraction '
'and reflection phases in 3D heterogeneous media, Geophys. J. '
'Int., 167, 253-270',
''),
('Saygin, E. 2007. Seismic receiver and noise correlation based '
'studies in Australia, PhD thesis, Australian National '
'University.',
'10.25911/5d7a2d1296f96')],
'contact_email': 'Malcolm.Sambridge@anu.edu.au',
'contact_name': 'Malcolm Sambridge',
'linked_sites': [('Software published on iEarth',
'http://iearth.edu.au/codes/FMTOMO/')],
'problem_short_description': 'The wave front tracker routines solves boundary '
'value ray tracing problems into 2D '
'heterogeneous wavespeed media, defined by '
'continuously varying velocity model calculated '
'by 2D cubic B-splines.',
'problem_title': 'Fast Marching Wave Front Tracking'}
1. Define the problem#
# get problem information from espresso FmmTomography
model_size = fmm.model_size # number of model parameters
model_shape = fmm.model_shape # 2D spatial grids
data_size = fmm.data_size # number of data points
ref_start_slowness = fmm.starting_model
# define CoFI BaseProblem
fmm_problem = cofi.BaseProblem()
fmm_problem.set_initial_model(ref_start_slowness)
# add regularization: damping + smoothing
damping_factor = 50
smoothing_factor = 5e3
reg_damping = damping_factor * cofi.utils.QuadraticReg(
model_shape=model_shape,
weighting_matrix="damping",
reference_model=ref_start_slowness
)
reg_smoothing = smoothing_factor * cofi.utils.QuadraticReg(
model_shape=model_shape,
weighting_matrix="smoothing"
)
reg = reg_damping + reg_smoothing
def objective_func(slowness, reg, sigma, reduce_data=None): # reduce_data=(idx_from, idx_to)
if reduce_data is None: idx_from, idx_to = (0, fmm.data_size)
else: idx_from, idx_to = reduce_data
ttimes = fmm.forward(slowness)
residual = fmm.data[idx_from:idx_to] - ttimes[idx_from:idx_to]
data_misfit = residual.T @ residual / sigma**2
model_reg = reg(slowness)
return data_misfit + model_reg
def gradient(slowness, reg, sigma, reduce_data=None): # reduce_data=(idx_from, idx_to)
if reduce_data is None: idx_from, idx_to = (0, fmm.data_size)
else: idx_from, idx_to = reduce_data
ttimes, A = fmm.forward(slowness, return_jacobian=True)
ttimes = ttimes[idx_from:idx_to]
A = A[idx_from:idx_to]
data_misfit_grad = -2 * A.T @ (fmm.data[idx_from:idx_to] - ttimes) / sigma**2
model_reg_grad = reg.gradient(slowness)
return data_misfit_grad + model_reg_grad
def hessian(slowness, reg, sigma, reduce_data=None): # reduce_data=(idx_from, idx_to)
if reduce_data is None: idx_from, idx_to = (0, fmm.data_size)
else: idx_from, idx_to = reduce_data
A = fmm.jacobian(slowness)[idx_from:idx_to]
data_misfit_hess = 2 * A.T @ A / sigma**2
model_reg_hess = reg.hessian(slowness)
return data_misfit_hess + model_reg_hess
sigma = 0.00001 # Noise is 1.0E-4 is ~5% of standard deviation of initial travel time residuals
fmm_problem.set_objective(objective_func, args=[reg, sigma, None])
fmm_problem.set_gradient(gradient, args=[reg, sigma, None])
fmm_problem.set_hessian(hessian, args=[reg, sigma, None])
Review what information is included in the BaseProblem object:
fmm_problem.summary()
=====================================================================
Summary for inversion problem: BaseProblem
=====================================================================
Model shape: (1536,)
---------------------------------------------------------------------
List of functions/properties set by you:
['objective', 'gradient', 'hessian', 'initial_model', 'model_shape']
---------------------------------------------------------------------
List of functions/properties created based on what you have provided:
['hessian_times_vector']
---------------------------------------------------------------------
List of functions/properties that can be further set for the problem:
( not all of these may be relevant to your inversion workflow )
['log_posterior', 'log_posterior_with_blobs', 'log_likelihood', 'log_prior', 'hessian_times_vector', 'residual', 'jacobian', 'jacobian_times_vector', 'data_misfit', 'regularization', 'regularization_matrix', 'forward', 'data', 'data_covariance', 'data_covariance_inv', 'blobs_dtype', 'bounds', 'constraints']
2. Define the inversion options#
my_options = cofi.InversionOptions()
# cofi's own simple newton's matrix-based optimization solver
my_options.set_tool("cofi.simple_newton")
my_options.set_params(num_iterations=5, step_length=1, verbose=True)
Review what’s been defined for the inversion we are about to run:
my_options.summary()
=============================
Summary for inversion options
=============================
Solving method: None set
Use `suggest_solving_methods()` to check available solving methods.
-----------------------------
Backend tool: `<class 'cofi.tools._cofi_simple_newton.CoFISimpleNewton'>` - CoFI's own solver - simple Newton's approach (for testing mainly)
References: ['https://en.wikipedia.org/wiki/Newton%27s_method_in_optimization']
Use `suggest_tools()` to check available backend tools.
-----------------------------
Solver-specific parameters:
num_iterations = 5
step_length = 1
verbose = True
Use `suggest_solver_params()` to check required/optional solver-specific parameters.
3. Start an inversion#
inv = cofi.Inversion(fmm_problem, my_options)
inv_result = inv.run()
inv_result.summary()
Iteration #0, updated objective function value: 1787.077540309464
Iteration #1, updated objective function value: 121.06987606708411
Iteration #2, updated objective function value: 5.825780480485424
Iteration #3, updated objective function value: 3.671788666773696
Iteration #4, updated objective function value: 1.6075547129972418
============================
Summary for inversion result
============================
SUCCESS
----------------------------
model: [0.00048285 0.00048069 0.00047884 ... 0.00050868 0.000508 0.00050718]
num_iterations: 4
objective_val: 1.6075547129972418
n_obj_evaluations: 6
n_grad_evaluations: 5
n_hess_evaluations: 5
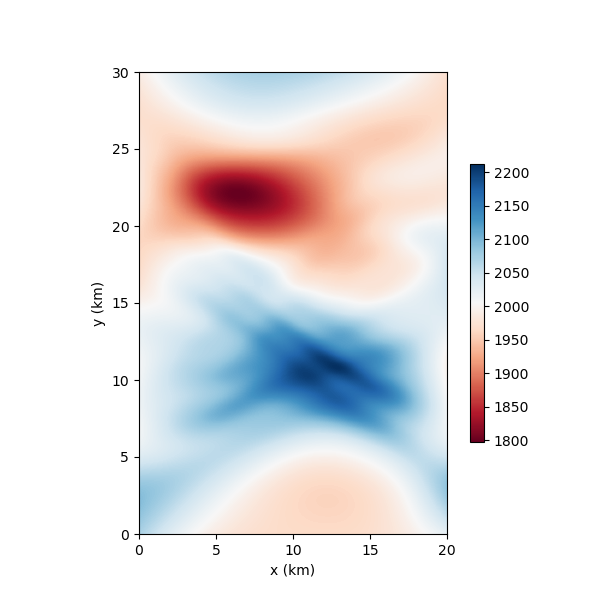
4. Plotting#
fmm.plot_model(inv_result.model); # inverted model
fmm.plot_model(fmm.good_model); # true model
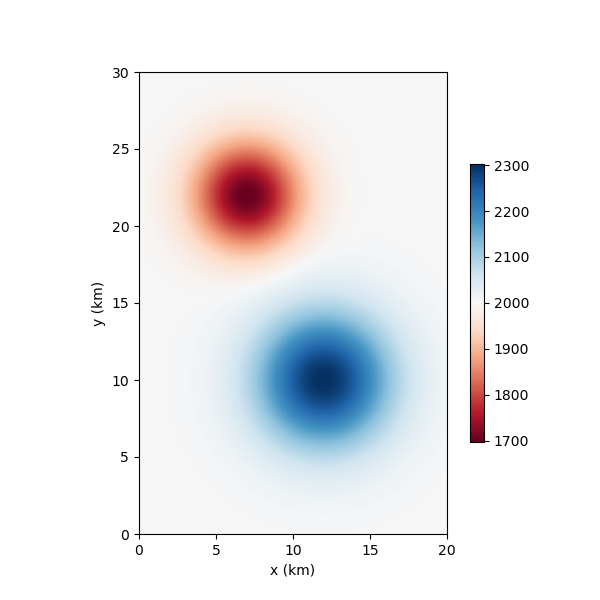
<Axes: xlabel='x (km)', ylabel='y (km)'>
Watermark#
watermark_list = ["cofi", "espresso", "numpy", "matplotlib"]
for pkg in watermark_list:
pkg_var = __import__(pkg)
print(pkg, getattr(pkg_var, "__version__"))
cofi 0.2.7
espresso 0.3.13
numpy 1.24.4
matplotlib 3.8.3
sphinx_gallery_thumbnail_number = -1
Total running time of the script: (0 minutes 7.284 seconds)